Představte si, že jste jedním z prvních cestujících Royal Caribbean International – „Quantum of the Seas“. Jakmile vstoupíte na loď, uslyšíte velitele, který žádá všechny cestující & členy posádky, aby si zapnuli bezpečnostní pásy a zůstali ve svých místnostech, dokud nebude plavba dokončena!
rozhodně je to něco, co by žádný cestující nechtěl slyšet, kdo strávil jmění, aby si užil vynikající vybavení, jídlo a výjimečnou krásu takové nádherné lodi.
to by se však mohlo stát skutečností, pokud by loď nebyla vybavena stroji nebo byla navržena tak, aby překonala všechny různé druhy pohybů, které pociťují na mořích.
proč brát pouze výletní lodě a zaoceánské parníky, přemýšlejte o lodích přepravujících náklad, jako jsou hromadné lodě, lodě Ro-Ro nebo dokonce tankery & nosiče LNG. Jen si představte, jak obtížné by bylo bezpečně přepravovat náklad (kapalný nebo sypký), kdybychom neměli žádnou technologii pro řízení různých pohybů během plavby.
v tomto článku se zaměříme na to, jak můžeme řídit „valivý pohyb“ lodi a různé principy různých typů systémů stabilizace válců.
související čtení: Prémiové e-knihy napsané námořními profesionály
válcování je skutečně největším problémem mezi všemi ostatními pohyby v mořích. Technologický pokrok v konstrukci lodí již dal americkým námořním architektům výhodu studovat vlnové pohyby kolem trupu lodi a poskytnout nejlepší možný design, aby se minimalizovaly tyto účinky & zajistit pohodlnou a bezpečnou plavbu pro cestující a posádku.

Kredity obrázku: George / Wikimedia
stabilizace pohybu role lze dosáhnout u konvenčních lodí změnou jejich tvaru trupu, avšak snížení amplitud role je možné i jinými prostředky. Stabilizační systémy lze obecně rozdělit na–
- pasivní systémy: ve kterých není vyžadován žádný samostatný zdroj energie a žádný speciální řídicí systém, jako je drenážní kýl, protiběžné nádrže (pasivní), pevná žebra & pasivní pohyblivý hmotnostní systém.
- aktivní systémy: ve kterém je moment protilehlý válec produkován pohyblivými hmotami nebo řídicími plochami pomocí síly, jako jsou aktivní žebra, Anti-válcovací nádrže (aktivní), aktivní pohyblivá hmotnost & gyroskop.
drenážní kýly
drenážní kýly jsou nejoblíbenější a jsou vybaveny velkou většinou lodí. Jedná se o desky vyčnívající z přelomu příkopu a rozkládající se přes střední polovinu na dvě třetiny délky lodi.
aby se zabránilo poškození, nevyčnívají normálně za boční nebo kýlové linie lodi, ale musí proniknout mezní vrstvou kolem trupu.
způsobují, že se vodní útvar pohybuje s lodí a vytváří turbulence, čímž tlumí pohyb a způsobuje prodloužení doby a snížení amplitudy.
i když mají relativně malý rozměr, mají velké páky kolem osy válcování a síly na nich vytvářejí velký moment proti válcování.
jejich účinek je obecně umocněn rychlostí vpřed. Jsou vyrovnány s proudem vody kolem trupu ve stojaté vodě, aby se snížil jejich odpor v tomto stavu. Když je loď válcování táhnout zvýší a zpomalit loď trochu.
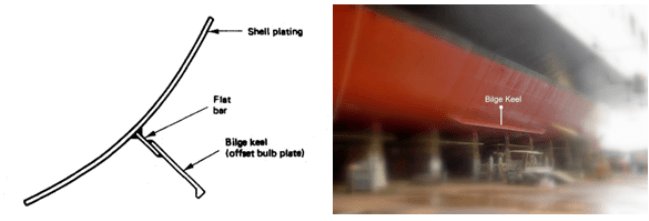
strukturální složka stokového kýlu (zdroj: INA-Eric Tupper)
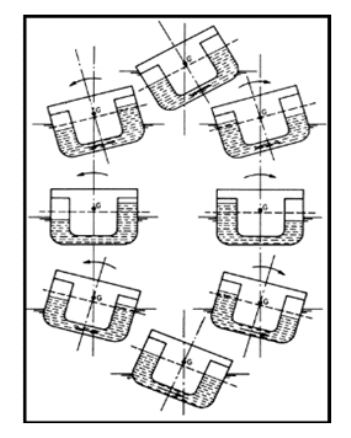
pasivní Tankový systém (zdroj: Základní teorie lodí, BST)
protiproudové nádrže (aktivní)
jsou podobné principu systému pasivních nádrží, ale pohyb vody je řízen čerpadly nebo tlakem vzduchu nad vodní hladinou. Nádrže na obou stranách lodi mohou být spojeny dolní končetinou nebo mohou být použity dvě samostatné nádrže.
vzduchový kanál obsahuje ventily ovládané zařízením pro snímání role. Tento koncept používá axiální průtokové čerpadlo k vynucení vody v nádrži z jedné strany lodi na druhou, spíše než mít to slosh pod přirozeným válcem, houpat a zatáčet síly, jak se to děje v pasivní nádrži.
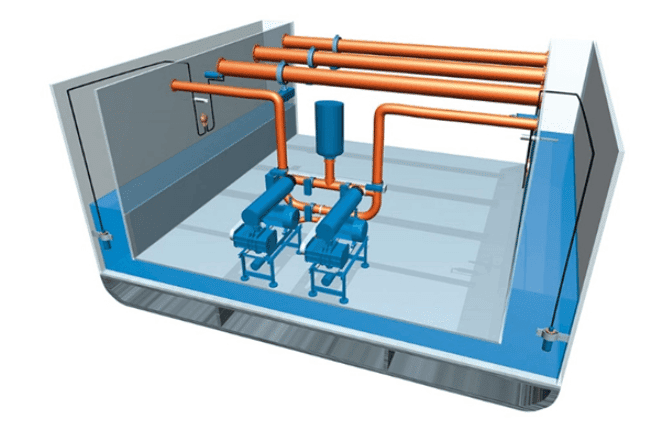
aktivní systém tanků (zdroj: www.hoppe-marine.com)
ve zjednodušené verzi aktivního systému akcelerometr snímá valivé pohyby a signály jsou odesílány z tohoto zařízení pro snímání rolí do čerpadla s proměnnou roztečí, které řídí tok kapaliny mezi nádržemi.
zařízení může být buď jednoduchý akcelerometr nebo komplikovaný gyroskopický snímací systém, který detekuje i malý úhel role gyroskopickou precesí.
zařízení lze tedy použít k řízení pohybu lodi v důsledku každé jednotlivé vlny. V závislosti na propracovanosti systému bylo zjištěno, že aktivní stabilizátory nádrže ponechávají účinnost 80% nebo více při stabilizaci pohybu.
aktivní ploutve
s aktivními ploutvemi citlivý gyroskopický systém snímá valivý pohyb lodi a vysílá signál do ovládacího systému, který zase způsobuje, že se ploutve pohybují ve směru, který způsobuje síly proti válce. Ovládací zařízení je obvykle elektrohydraulické.
ploutve, které mohou být schopné zatažení do trupu, jsou umístěny kolem zatáčky, aby bylo zajištěno maximální pákové působení sil působících na ně.
může být použita klapka od zadní hrany, aby se zvýšila generovaná síla zdvihu. Kapacita systému ploutví je obvykle vyjádřena jako stálý úhel paty, který může způsobit, když se loď pohybuje vpřed ve stojaté vodě při dané rychlosti.
síla na ploutve se mění v poměru k druhé mocnině rychlosti lodi, zatímco křivka GZ pro loď je nezávislá na rychlosti. Systém ploutví však pravděpodobně nebude příliš účinný při rychlostech pod asi 10 uzlů.
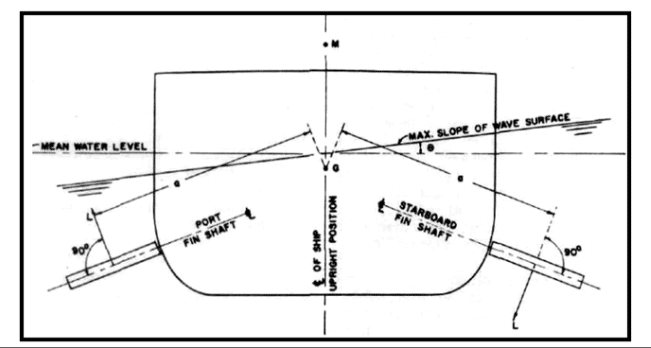
uspořádání žeber v aktivovaném systému žeber

stabilizační systém Fin (zdroj: alibaba.kom)
následující tabulka zdůrazňuje některé z hlavních aspektů stabilizátorů rolí, jak je uvedeno výše:
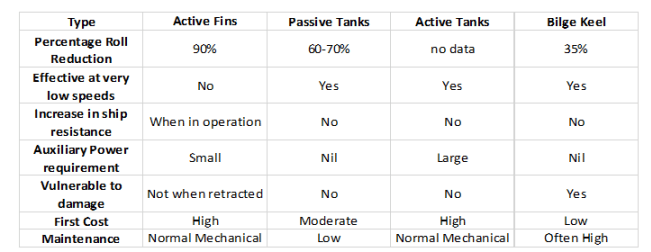
Tabulka 1: srovnání mezi různými stabilizátory role (zdroj: BST)
z výše uvedeného pozorování lze konstatovat, že každý stabilizační systém má své vlastní výhody & nevýhody. Proto je třeba věnovat větší úsilí hydrostatice a hydrodynamice pohybu lodního trupu vlnami, aby se zabránilo potřebě druhu stabilizačního systému válců nebo jeho využití na minimum.
související čtení: Stáhněte si zdarma námořní e-knihy 12-Klikněte zde.
také v zásadě metody používané ke stabilizaci proti válce mohou být použity ke stabilizaci proti hřišti, ale zúčastněné síly jsou příliš velké na to, aby ospravedlnily jejich použití.
na vás..
víte o nějakém jiném typu stabilizačních systémů válců používaných pro lodě?
dejte vědět v komentářích níže.
zřeknutí se odpovědnosti: názory autorů vyjádřené v tomto článku nemusí nutně odrážet názory Marine Insight. Údaje a grafy, pokud jsou v článku použity, pocházejí z dostupných informací a nebyly ověřeny žádným statutárním orgánem. Autor a Marine Insight netvrdí, že je přesný, ani nepřijímají žádnou odpovědnost za totéž. Názory představují pouze názory a nepředstavují žádné pokyny ani doporučení ohledně jakéhokoli postupu, který by měl čtenář dodržovat.
článek nebo obrázky nelze reprodukovat, kopírovat, sdílet nebo používat v jakékoli formě bez souhlasu autora a Marine Insight.