wyobraź sobie, że jesteś jednym z pierwszych pasażerów Royal Caribbean International – „Quantum of the Seas”. Jak tylko wejdziesz na statek, usłyszysz, jak Kapitan prosi wszystkich pasażerów & członków załogi o zapięcie pasów bezpieczeństwa i pozostanie w swoich pokojach do zakończenia podróży!
zdecydowanie jest to coś, czego żaden pasażer nie chciałby usłyszeć, kto wydał fortunę, aby cieszyć się doskonałymi udogodnieniami, jedzeniem i wyjątkowym pięknem tak wspaniałego statku.
jednak mogłoby to stać się rzeczywistością, gdyby statek nie był wyposażony w maszyny lub został zaprojektowany w taki sposób, aby przezwyciężyć wszystkie rodzaje ruchów odczuwanych na morzu.
po co zabierać tylko statki wycieczkowe i liniowce oceaniczne, pomyśl o statkach przewożących ładunki, takich jak masowce, statki Ro-Ro, a nawet tankowce & LNG. Wyobraź sobie, jak trudno byłoby bezpiecznie przewozić ładunek (płynny lub sypki), gdybyśmy nie mieli żadnej technologii do kontrolowania różnych ruchów podczas podróży.
w tym artykule skupimy się na tym, jak możemy kontrolować „ruch toczny” statku i różne zasady stojące za różnymi typami systemów stabilizacji rolki.
Related Reading: ebooki Premium napisane przez specjalistów morskich
Toczenie jest rzeczywiście największym problemem wśród wszystkich innych ruchów na morzu. Postęp technologiczny w projektowaniu statków już dał nam architektów morskich przewagę do badania ruchów fal wokół kadłuba statku i dać najlepszy możliwy projekt, aby zminimalizować takie efekty & zapewnić komfortową i bezpieczną podróż dla pasażerów i załogi.

Image Credits: George / Wikimedia
stabilizacja ruchu przechyłu może być osiągnięta w konwencjonalnych statkach poprzez zmianę ich kształtów kadłuba, jednak zmniejszenie amplitud przechyłu jest możliwe również za pomocą innych środków. Systemy stabilizacji można ogólnie podzielić na–
- Systemy pasywne: w których nie jest wymagane oddzielne źródło zasilania i nie ma specjalnego systemu sterowania, takiego jak kil Zęzowy, zbiorniki przeciwpowodziowe (pasywne), stałe płetwy & pasywny system ciężaru ruchomego.
- układy aktywne: w których moment przeciwstawny rolki jest wytwarzany przez ruchome masy lub powierzchnie sterujące za pomocą mocy, takich jak aktywne płetwy, zbiorniki przeciwpowodziowe (aktywne), aktywny ruchomy ciężar & żyroskop.
stępki zęzowe
stępki zęzowe są najbardziej popularne i pasują do większości statków. Są to płyty wystające z zakrętu zęzy i rozciągające się w środkowej połowie do dwóch trzecich długości okrętu.
aby uniknąć uszkodzeń, zwykle nie wystają poza burty statku lub linie stępki, ale muszą przebić warstwę graniczną wokół kadłuba.
powodują one, że woda porusza się wraz ze statkiem i tworzą turbulencje, tłumiąc w ten sposób ruch i powodując wzrost okresu i zmniejszenie amplitudy.
mimo stosunkowo małych wymiarów, mają duże dźwignie wokół osi tocznej, a siły na nich wytwarzają duży moment przeciwny toczeniu.
ich efekt jest na ogół wzmocniony przez szybkość do przodu. Są one wyrównane z przepływem wody przez kadłub w wodzie niegazowanej, aby zmniejszyć ich opór w tym stanie. Kiedy statek jest toczenia Opór wzrośnie i spowolnić statek trochę.
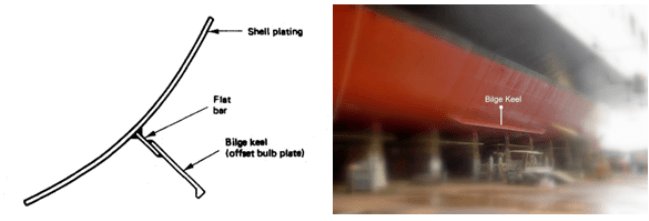
element konstrukcyjny stępki zęzowej (źródło: Ina-Eric Tupper)
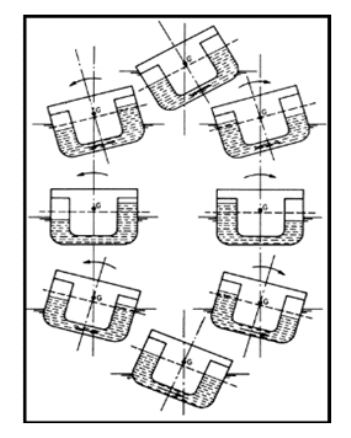
pasywny system zbiornika (źródło: Podstawowa teoria statków, BST)
zbiorniki przeciwoblodzeniowe (aktywne)
są one podobne do zasady pasywnego systemu zbiorników, ale ruch wody jest kontrolowany przez pompy lub ciśnienie powietrza nad powierzchnią wody. Zbiorniki po obu stronach statku mogą być połączone kończyną dolną lub można użyć dwóch oddzielnych zbiorników.
kanał powietrzny zawiera Zawory obsługiwane przez urządzenie wykrywające rolki. Koncepcja ta wykorzystuje pompę osiową do wymuszania wody w zbiorniku z jednej strony statku na drugą, a nie do jej rozlewania pod naturalnymi siłami toczenia, kołysania i odchylania, jak to ma miejsce w pasywnym zbiorniku.
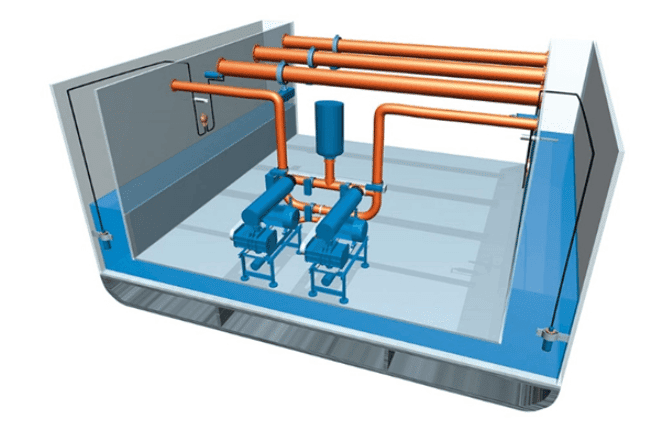
Aktywny System zbiorników (źródło: www.hoppe-marine.com)
w uproszczonej wersji aktywnego systemu akcelerometr wykrywa ruchy toczenia, a sygnały są wysyłane z tego urządzenia wykrywającego rolki do pompy o zmiennym skoku, która kontroluje przepływ cieczy między zbiornikami.
urządzenie może być prostym akcelerometrem lub skomplikowanym żyroskopowym systemem wykrywania, który wykrywa nawet mały kąt rolki przez żyroskopową precesję.
dzięki temu urządzenie może być używane do sterowania ruchem statku z powodu każdej pojedynczej fali. W zależności od zaawansowania systemu stwierdzono, że aktywne stabilizatory zbiornika pozostawiają skuteczność 80% lub więcej w stabilizacji ruchu.
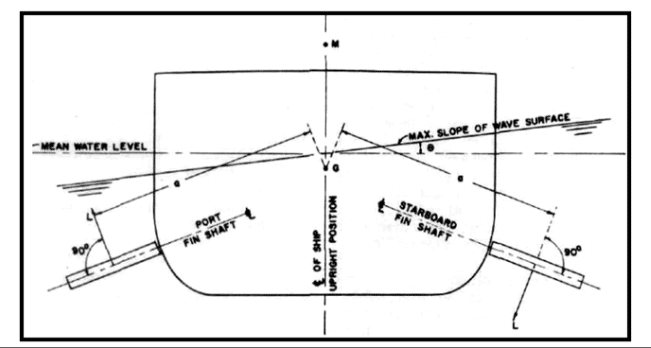
aktywne płetwy
w przypadku aktywnych płetw wrażliwy system żyroskopowy wyczuwa ruch toczny statku i wysyła sygnał do systemu uruchamiającego, który z kolei powoduje, że płetwy poruszają się w takim kierunku, aby spowodować siły przeciwstawne rolce. Urządzenie uruchamiające jest zwykle elektrohydrauliczne.
płetwy, które mogą być zdolne do cofania się w kadłubie, są umieszczone wokół zakrętu zęzy, aby zapewnić maksymalną dźwignię dla działających na nie sił.
w celu zwiększenia siły podnoszenia można użyć klapy od krawędzi spływu. Pojemność systemu płetwowego jest zwykle wyrażana w kategoriach stałego kąta przechyłu, jaki może on spowodować, gdy statek porusza się naprzód w nieruchomej wodzie z określoną prędkością.
siła na płetwie zmienia się proporcjonalnie do kwadratu prędkości statku, podczas gdy krzywa GZ Dla statku jest niezależna od prędkości. System płetw nie jest jednak zbyt skuteczny przy prędkościach poniżej około 10 węzłów.
układ płetw w układzie płetw aktywowanych

System stabilizatora płetwy (źródło: alibaba.kom)
poniższa tabela podkreśla niektóre z głównych aspektów stabilizatorów rolek, jak omówiono powyżej:
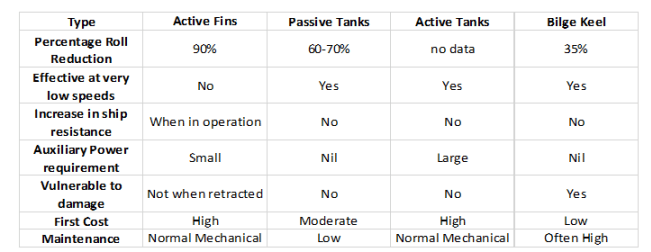
Tabela 1: Porównanie różnych stabilizatorów rolek (źródło: BST)
z powyższej obserwacji można wywnioskować, że każdy system stabilizacji ma swoje zalety & wady. W związku z tym należy włożyć więcej wysiłku w hydrostatykę i hydrodynamikę ruchu kadłuba statku przez fale, aby uniknąć potrzeby stosowania systemu stabilizacji walców lub wykorzystać go do minimum.
podobne Lektury: Pobierz 12 darmowych ebooków morskich-Kliknij tutaj.
ponadto, zasadniczo metody stosowane do stabilizacji przed walcem mogą być używane do stabilizacji przed tonem, ale zaangażowane moce są zbyt duże, aby uzasadnić ich użycie.
do ciebie..
Czy wiesz o innych typach systemów stabilizacji walców stosowanych na statkach?
dajcie znać w komentarzach poniżej.
Zastrzeżenie: poglądy autorów wyrażone w tym artykule niekoniecznie odzwierciedlają poglądy Marine Insight. Dane i wykresy, jeśli zostały użyte w artykule, pochodzą z dostępnych informacji i nie zostały uwierzytelnione przez żaden organ ustawowy. Autor i Marine Insight nie twierdzą, że są dokładne, ani nie ponoszą za to żadnej odpowiedzialności. Opinie stanowią jedynie opinie i nie stanowią żadnych wytycznych ani rekomendacji co do postępowania, które czytelnik powinien zastosować.
artykuł lub zdjęcia nie mogą być powielane, kopiowane, udostępniane lub wykorzystywane w jakiejkolwiek formie bez zgody autora i Marine Insight.